بروزرسانیشده در فروردین 6, 1401
برای انجام برخی کارها همیشه آرزو می کردید که کاش دست سومی هم داشتید. برای مثال در لحیم کاری باید هویه را در یک دست و سیم لحیم را در دست دیگر بگیریم بنابراین دیگر دستی برای گرفتن قطعه کار باقی نمی ماند.
بازوی رباتی BionicCobot که توسط شرکت فستو ساخته شده است دقیقا مانند یک دستیار عمل کرده و به مانند دست سوم می باشد. این بازو می تواند قطعه کار را بگیرد نگه دارد و یا بچرخاند، به طور کلی هر حرکتی که برای انجام کارهای اینچنینی مورد نیاز باشد قادر است برای ما اجرا کند.
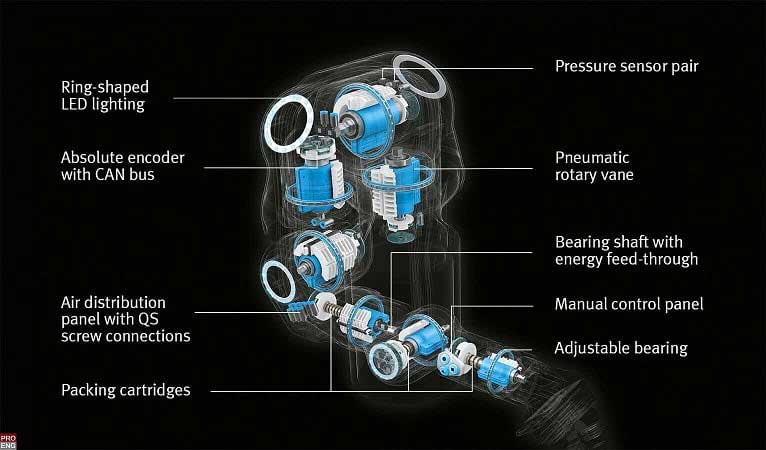
ربات BionicCobot فستو یک ربات سبک وزن 7محور می باشد که فقط با استفاده از محرکه های نیمه دوار(semi-rotry) پنوماتیکی به حرکت در می آید. حرکت های این ربات بر اساس حرکت های بازوی انسان است.
درست مانند نمونه بیولوژیکی عمل می کند به طوریکه از مکانیزم حرکت عضلات سه سر و دو سر بازویی استفاده می کند(این حرکت را نه تنها در یک مفصل بلکه در تمام هفت مفصل موجود انجام می دهد).
انعطاف پذیری به عنوان عمده مزیت این ربات پنوماتیکی
از آنجا که هوا سیالی تراکم پذیر است مهمترین ویژگی پنوماتیک –همچنین این بازو پنوماتیکی- انعطاف پذیری ذاتی شان در ارتباط با سیستم می باشد.
در ربات BionicCobot این ویژگی باعث یک برتری بسیار جشمگیر نسبت به نمونه های موتوری و گیربکسی آن می شود. در صورت برخورد با یک مانع، توانایی ذکر شده(ویژگی انعطاف پذری) قابلیت تغییر طول برای ربات به ارمغان آورده است به طوریکه ربات براساس این خاصیت به سرعت در یک موقعیت ایمن قرار می گیرد.
سیستم کنترل موقعیت BionicCobot به طور طبیعی انعطاف پذیری بیشتری نسبت به یک سیستم صلب ایجاد می کند. هر یک از محرکه های هفت محور با یک شیر اختصاصی به طور جداگانه هدایت می شوند و فشار هر محور نیز به طور جداگانه قابل تنظیم می باشد.
بر اساس نوع کاربرد گشتاور هر یک از مفاصل به طو جداگانه قابل کنترل می باشد. به این ترتیب ربات نسبت به انجام کارهایی مانند نگه داشتن و اعمال نیروی مخالف که نیاز به اعمال فشار بالایی دارند تواناست.
در مقابل یک حرکت با نیروی بالا اگرچه گشتاورهای ربات قابل تنظیم است ولی ربات می تواند هم قطعه کار و هم خودش را در مقابل تغییر وضعیت حفظ کند و نگه دارد.
نیروهای گرانشی وارد بر بازو براساس موقعیت بازو تغییر میکند و توسط روابط ریاضی به طور دقیق تعیین می شوند. بنابراین نیروی گیرنده قطعه کار می تواند به وسیله اپراتور تعیین جهت شود به طوریکه بار گرانشی برای ربات ایجاد نکند.

پیچیدگی تنظیمات و تکنولوژی کنترل
محرکه های ربات بر روی مفاصلی از BionciCobot که حرکت می کنند نصب شده است. سنسورها نیز در ماژول محور برای اندازه گیری زوایای مفصل و فشار برای اندازه گیری فشار محفظه محرکه ها نصب شده است. سیستم تنظیم و فن آوری پیچیده کنترل این ربات یک مسیر به اصطلاح کنترل پیرو(path follower control ) را فعال می سازد که با سیستم های پنوماتیک استاندارد قابل دسترسی نمی باشد.
در رباتیک یک حرکت مورد نیاز معمولا در مختصات ابزار(gripper coordinates) برنامه ریزی می شود و توسط ماتریس تبدیل به حرکات زاویه ای مفاصل تبدیل می شود. تمام حرکات هر هفت مفصل این رباط در این مختصات برنامه ریزی شده اند و قادرند هر حرکتی را به اجرا بگذارند. به این ترتیب BionciCobot می تواند یک دستیار با عنوان دست سوم در فعالیت های شما باشد.
منبع: وب سایت مهندس حرفه ای