فهرست مطالب:
بروزرسانیشده در فروردین 6, 1401
انواع عملگرها
عملگر نوعی موتور است که برای به حرکت در آوردن و کنترل یک مکانیزم یا سیستم مورد استفاده قرار می گیرد. در حقیقت زیر مجموعه ای از ترنسدیوسرها هستند که سیگنال ورودی را به حرکت تبدیل می نمایند. عملگرها به وسیله نوعی از انرژی به حرکت در می آیند. از جمله این انرژی ها می توان به انرژی حاصل از جریان الکتریکی، نیروهای هیدرولیکی و نئوماتیکی اشاره نمود.
انواع عملگر ها بر اساس نوع کارایی آنها می توان به موتور های الکتریکی، عملگرهای الکترو مکانیکی، عملگر های هیدرولیکی، عملگرهای نئوماتیکی، عملگرهای پیزوالکتریک، عملگرهای ترکیبی نام برد و برای هر یک توضیح کوتاهی داده می شود.
موتورهای الکتریکی
موتورهای الکتریکی و به خصوص سروو موتور ها بیش ترین کاربرد را در میان عملگرها در رباتیک دارند. سرو موتور ها با توجه به درایوری که دارند می توانند انواع کنترل ها را با توجه به ویژگی آن در حالت گشتاور (Tourqe mode) یا در حالت موقیت (Position mode) استفاده کنند.
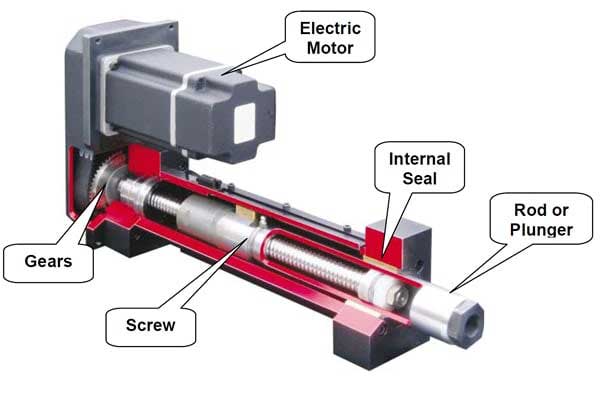
عملگرهای الکترومکانیکی
در این نوع عملگرها حرکت توسط موتور الکتریکی تولید شده و توسط یک مکانیزم برای مثال بال اسکرو (ball screw) به حرکت دلخواه (معمولا خطی) تبدیل می شود.
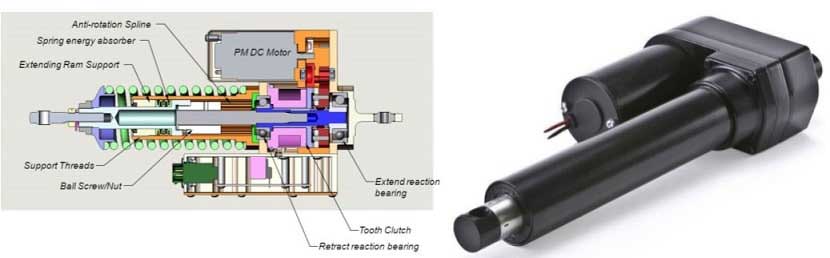
عملگر الکترومکانیکی
عملگرهای هیدرولیکی و پنیوماتیک
عمدتا از یک سیلندر توخالی و یک پیستون تشکیل شده اند که پیستون می تواند در سیلندر حرکت کند. با اعمال فشار به یک طرف پیستون، پیستون شروع به حرکت کرده و در نتیجه می تواند تولید نیرو و حرکت نماید. به دلیل غیرقابل تراکم بودن مایعات عملگرهای هیدرولیکی می توانند حرکت خطی قابل کنترلی ایجاد نمایند. عملگر های پنیوماتیکی هم مانند عملگر هیدرولیکی می باشد ولی از گاز به جای سیال برای حرکت دادن پیستون استفاده می کنند که ویژگی آن سرعت بالای آن نسبت به هیدرولیک می باشد.

شماتیکی از یک عملگر هیدرولیکی و پنیوماتیکی
عملگرهای پیزوالکتریک (Piezoelectric)
مواد پیزوالکتریک موادی هستند که در اثر اعمال ولتاژ منبسط می شوند. همین خاصیت آن ها را برای استفاده در تولید عملگر مناسب می کند. با اعمال ولتاژ مشخص به آن ها به تغییر مکان متناسب با آن ولتاژ دست می یابیم. البته این تغییر طول ها بسیار کوچک می باشند و برای افزایش طول به اندازهی یک میلی متر بایستی یک متر ماده پیزوالکتریک در اختیار داشته باشیم.
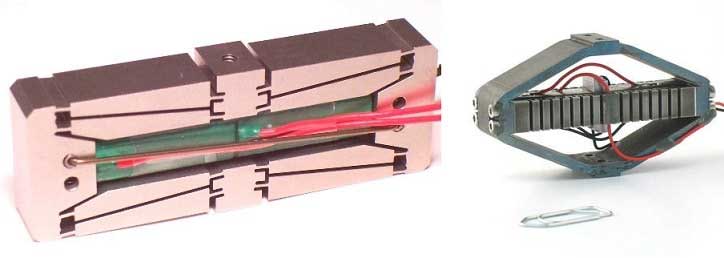
عملگلر پیزوالکتریک